- Pix4Dmapper来自于瑞士的Pix4D公司,是世界级研究机构EPFL近10年的研究成果。
- Pix4Dmapper是目前市场上独一无二的集全自动、 快速、专业精度为一体的无人机数据和航空影像处理软件。
- Pix4Dmapper无需专业知识,无需人工干预,即可将数千张影像快速制作成专业的、 精确的二维地图和三维模型。
1.打开Pix4Dmapper:

2.建立工程
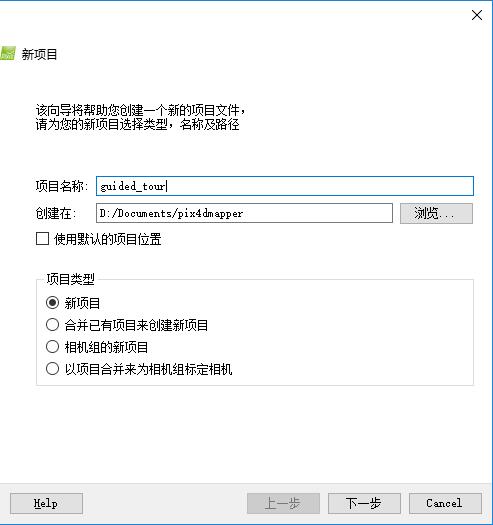
选“项目 – 新建项目”,在弹出来的对话框中设置工程的属性,输入工程名字,设置路径(工程名字以及工程路径不能包含中文)。“新项目”选上,然后选择“下一步”。
3.添加图像
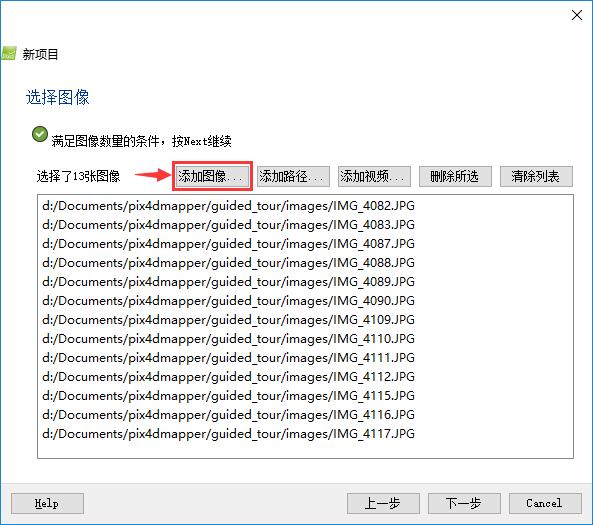
点击“添加图像”,选择加入的影像。影像路径可以不在工程文件夹中,路径中不要包含中文。点击“下一步”。
4.设置图片属性
图像坐标系:设置POS数据坐标系,默认是WGS84(经纬度)坐标。
地理定位和方向:设置POS数据文件,点击“从文件中…”选择POS文件。
相机型号:设置相机文件。通常软件能够自动识别影像相机模型。

确认各项设置后,点击“下一步”。
PS:一般情况下照片内置了POS位置信息,可以不用导入POS数据,但也存在很多独立存储的情况。
PS:POS数据一般格式如下:
IMG_4082,46.3414965400039,8.02588605999496,914.066589355469
IMG_4083,46.3411381999907,8.02537270001017,914.736022949219
IMG_4087,46.3411327000576,8.02484090003983,914.903991699219
IMG_4088,46.3415288000000,8.02528600000000,914.351989746094
IMG_4089,46.3419138999557,8.02582459995492,913.29052734375
IMG_4090,46.3422720000000,8.02637789999571,915.705017089844
IMG_4109,46.3424678999831,8.02576620003522,911.793029785156
IMG_4110,46.3421478999795,8.02534460000943,912.882995605469
IMG_4111,46.3418144000000,8.02490869994360,913.421020507812
IMG_4112,46.3414746000147,8.02447780001483,912.109008789062
IMG_4115,46.3416259000424,8.02414680005676,912.791015625000
IMG_4116,46.3420670000000,8.02463210000839,912.051025390625
IMG_4117,46.3424121999847,8.02513720002574,911.965026855469
5.设置输出坐标系
可以根据“自动检测”设置坐标系,亦可从.prj类型文件导入、列表选择、EPSG列表选择等方式确定输出坐标系。
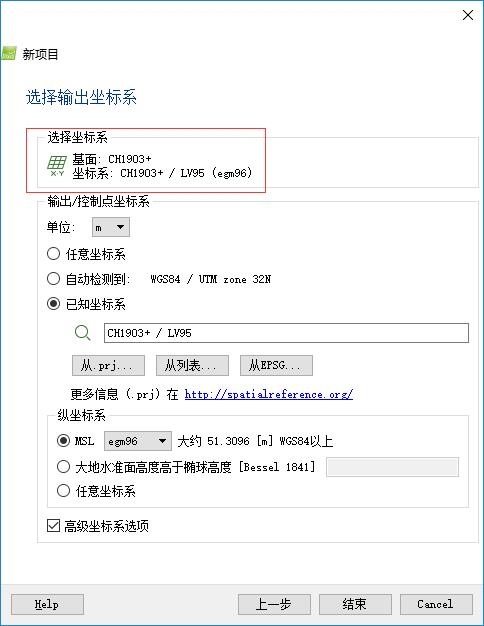
然后点击“结束”完成工程的建立。
控制点必须在测区范围内合理分布,通常在测区四周以及中间都要有控制点。要完成模型的重建至少要有3个控制点。通常100张相片6个控制点左右,更多的控制点对精度也不会有明显的提升(在高程变化大的地方更多的控制点可以提高高程精度)。控制点不要做在太靠近测区边缘的位置,控制点最好能够在5张影像上能同时找到(至少要两张)。
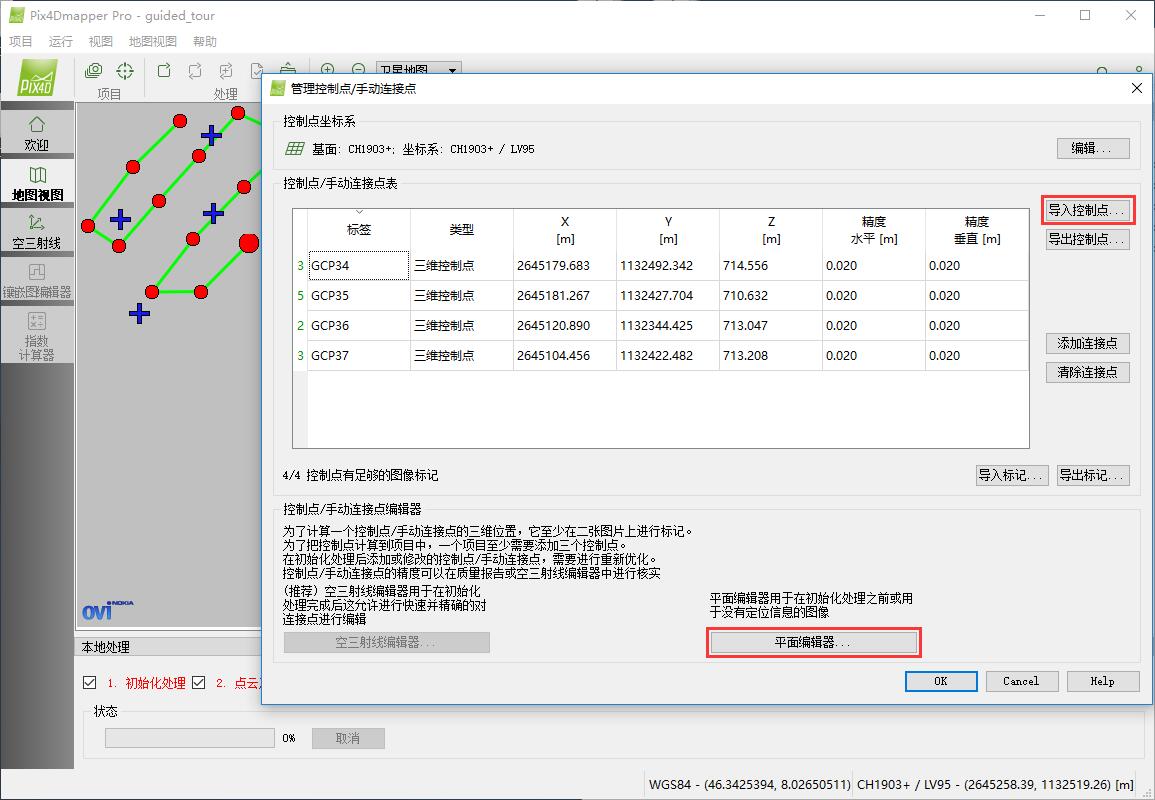
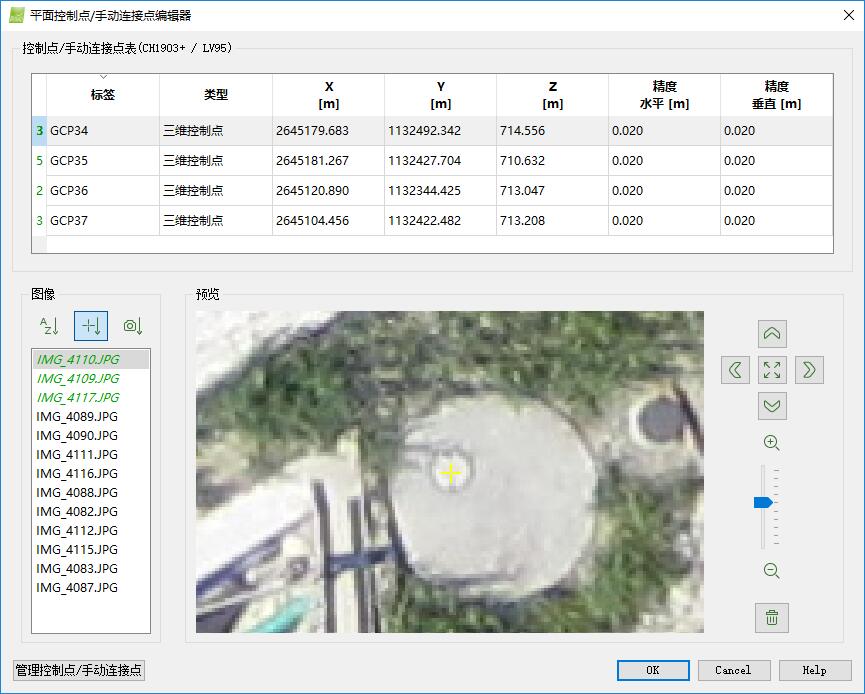
6.导入控制点
点项目,选择像控点编辑器。出现如下对话框。点击增加像控点后,图像会出现在对话框中,可以逐个刺出控制点。
选择导入像控点。在出来的对话框中设置像控点坐标系、导入像控点文件(csv、txt等格式)。
7.刺控制点
在左侧的图像列表中选中图像,右侧就会显示出该图像。在对应的位置上,鼠标左键击图像中的点,标出控制点位置。一个控制点最少要在两张图像上标出来,通常建议标注在3-8张图像上。在质量报告中会显示是否需要在更多的图像上标出控制点。
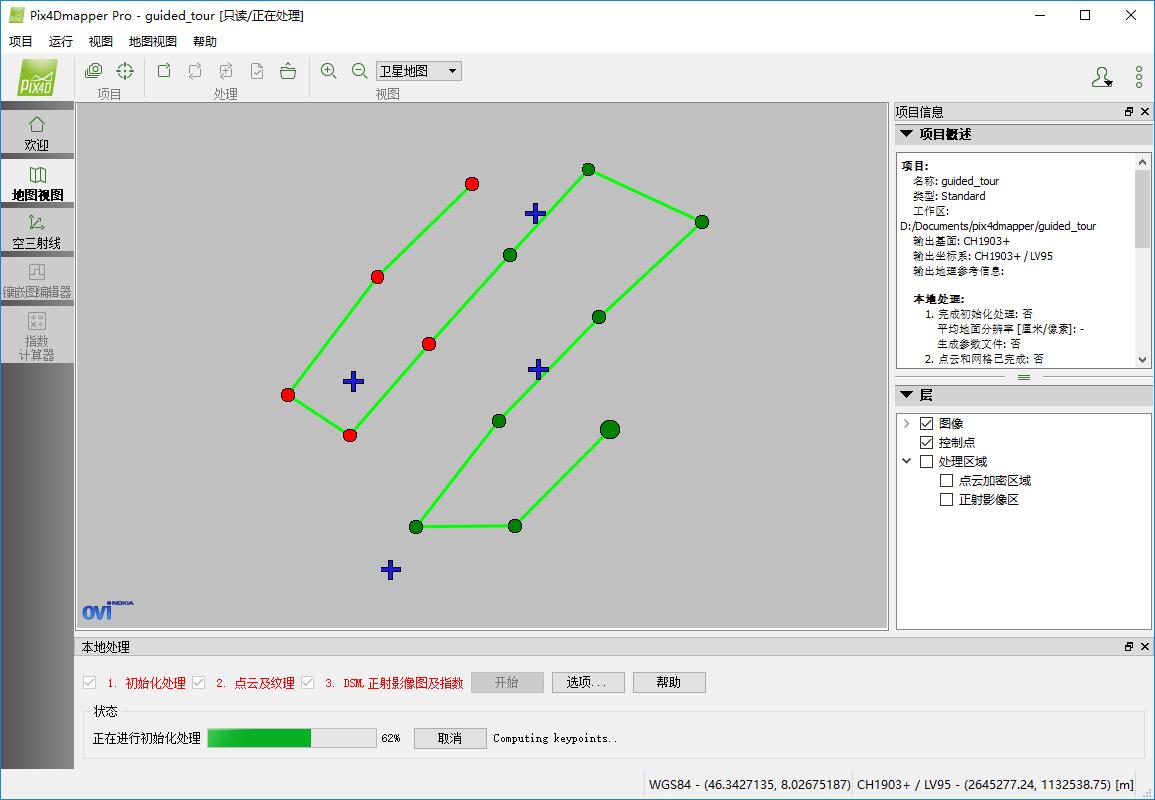
8.完成初步处理
点击菜单栏运行,选择本地处理,把初步处理以及高精度处理选上。点开始进行处理。
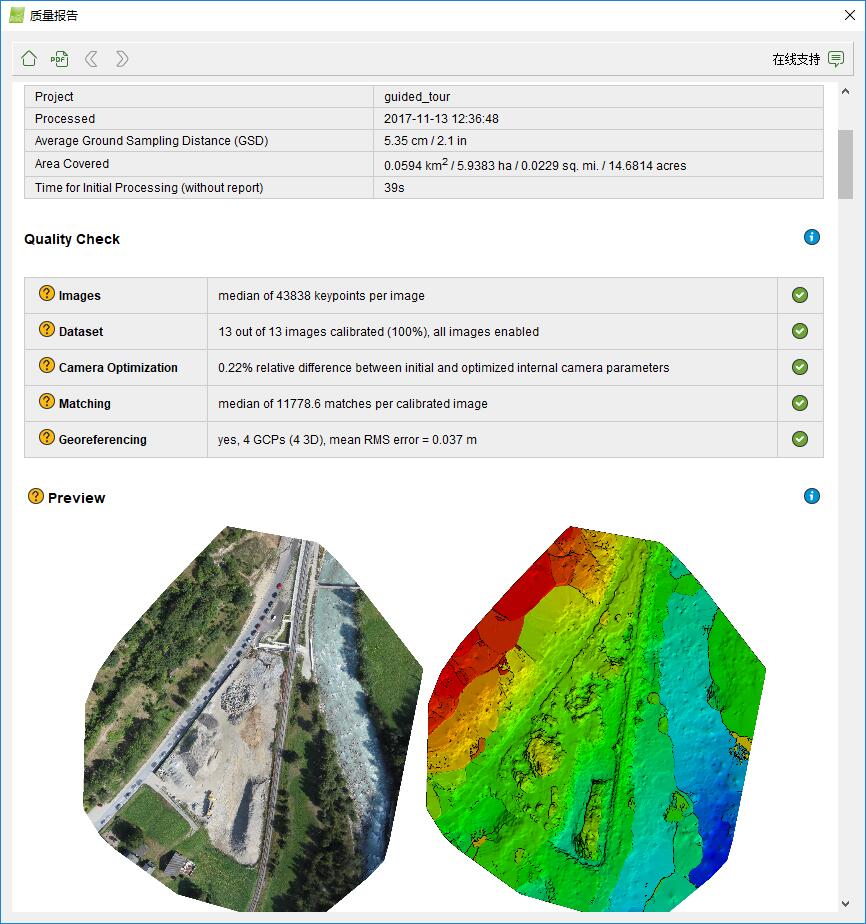
9.查看报告
可以看到计算的质量信息:GSD(地面分辨率)、面积、连接点数量、相机畸变参数、控制点精度等信息……
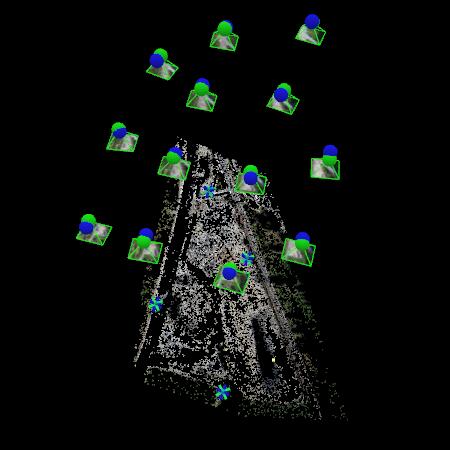
10.生成点云
11.生成正射影像图







请问正射影像处理过程里显示分配错误需要怎么解决,Caught exception during initial processing!
这个错误信息过于笼统了~
能否得到某张影像,对于计算得到的正射影像,的转换参数?
控制点坐标中的高程信息对输出数据有什么影响吗?外业打点时把Z坐标搞错了
统一错一个差值,到最后可以把差值加进去,千万别漏了;
如果没生产三维模型或者点云数据的话,建议改一下高程重新计算一下也很快的。
毕竟一个计算错误的结果如果被后面的人调用的话,他并不知道是错误的。
感谢,另外想请教一下,大面积正射时,分块施工应该如何来控制色差?
尝试一下PS吧,P4D软件生产的正射有分块数据的,用PS调一下试试看~ 那个我就不太熟悉了
你POS坐标是经纬度,控制点坐标是X、Y坐标系不统一啊,控制点和图像坐标系都不是一个啊
在导入照片、设定输出系统、导入像控点的三个步骤的时候都会设定坐标系统,分别选择数据对应的坐标系统。
并不存在不统一,导致没法计算的情况啊。
请问,我输出正射图的时候出现e0050错误代码是什么情况呢?
应该是内存不足,具体代码记不清了
在哪里能看到你所有的分享呀小菜鸟求指教
就这里了~~ 不多,一点点经验吧~ ^_^
控制点坐标导入一直出错,是什么原因呢
数据格式是否和导入的坐标系匹配?
请问生成DEM数字调和模型的简易教程有吗?
为何我咋呕出来道路会有一些错位,免像控点飞机,难道还是必须要做像控点么?
个人意见:一切不谈精度的免相控都是耍流氓,有那操心精度的时间相控都做好了。
请问,这个软件可以用若干个合成后的图来合成一张大图吗?质量报告中的相机校准错误有什么解决办法么?
1.如果合并栅格影像,可以尝试arcgis或global mapper合并导出;
2.如果默认相机参数计算后有问题,尝试在一次计算后,在相机参数界面导入一下优化后的参数再次计算。
导入POS数据弹出无定位信息的图像,POS数据到底要怎么做啊?大神
文内已经给了标准格式的POS数据,
检查一下POS信息是否一一对应,是否完整。
敢问高就哪家单位?
不敢,西安小技术员。:-)
大神有安装包?
并不提供安装包,谢谢关注! 🙂
在学习无人机相关软件时偶然看到前辈的文章,不仅做到内容精简还通俗易懂,很长使用,非常感谢。
感谢关注!:-)
前辈分享的都是干货,正好刚刚接触这一块!前辈的教程通俗易懂,接近实际。
偶然看到前辈的网站,觉得前辈的东西真是干货!很赞!